
Основные понятия и формулы по теме "Плоскость".
Всякое уравнение первой степени между тремя переменными определяет плоскость. Обратно, всякая плоскость определяется уравнением первой степени относительно текущих координат.
1. Общее уравнение плоскости имеет вид:
Ах + By +Cz + D = 0. (1)
Особые случаи уравнения (1).
а) Пусть в уравнении (1) свободный член D=О, тогда получим уравнение
Ах + By + Сz = 0 (2)
плоскости, проходящей через начало координат.
б) Пусть в уравнении (1) один из коэффициентов А, В и С равен 0.
Тогда получим уравнения плоскостей, параллельных соответствующим координатным осям:
By + Cz + D = 0 — уравнение плоскости, параллельной оси Ох; (3)
Ax + Cz + D = 0 — уравнение плоскости, параллельной оси Оу; (4)
Аx + By + D = 0 — уравнение плоскости, параллельной оси Oz. (5)
в) Пусть в уравнениях (3), (4), (5) свободный член D = 0. Тогда получим уравнения плоскостей, проходящих через соответствующие оси координат:
By + Cz = 0 — уравнение плоскости, проходящей через ось Ох; (6)
Ax + Cz = 0 — уравнение плоскости, проходящей через ось Оу; (7)
Ах + Ву = 0 — уравнение плоскости, проходящей через ось Oz. (8)
г) Пусть в уравнении (1) два коэффициента В = С = 0 или А = С = 0, или А = В = 0. Тогда получим уравнения плоскостей, параллельных соответствующим координатным плоскостям:
Ax + D = 0, или х = а — уравнение плоскости, параллельной координатной плоскости yOz; (9)
By + D = 0, или у = b — уравнение плоскости, параллельной координатной плоскости xOz; (10)
Сz + 0 = 0, или z = c — уравнение плоскости, параллельной координатной плоскости хОу. (11)
д) Пусть в уравнении (1) три коэффициента В, С и D или А, С и D, или A, В и D равны нулю. Тогда получим уравнения координатных плоскостей
Ах = 0, или x = 0 — уравнение плоскости yOz; (12)
Ву = 0, или у = 0 — уравнение плоскости xOz; (13)
Cz = 0, или z = 0 — уравнение плоскости хОу. (14)
2. Общее уравнение плоскости в векторной форме имеет вид:

 — вектор, перпендикулярный к данной плоскости;
— вектор, перпендикулярный к данной плоскости;  — текущий радиус-вектор.
— текущий радиус-вектор.3. Нормальное уравнение плоскости.
а) Нормальное уравнение плоскости в координатной форме имеет вид:

За параметры, определяющие плоскость, приняты: длина перпендикуляра (нормали) р, опущенного из начала координат на плоскость, и направляющие косинусы этого перпендикуляра
 .
.б) Нормальное уравнение плоскости в векторной форме имеет вид:

 - единичный вектор, перпендикулярный к данной плоскости; — направляющие косинусы вектора; р — расстояние плоскости от начала координат.
- единичный вектор, перпендикулярный к данной плоскости; — направляющие косинусы вектора; р — расстояние плоскости от начала координат.4. Для приведения общего уравнения плоскости (1) к нормальному виду (16), нужно умножить его на нормирующий множитель

выбрав знак перед корнем, противоположный знаку свободного члена D в уравнении (1).
Направляющие косинусы и параметр р определяются по формулам:


При этом, если D<0, то берутся верхние знаки; если D>0, то берутся нижние знаки.
5. Уравнение плоскости в отрезках имеет вид:

где за параметры, определяющие плоскость, приняты отрезки a, b и с, отсекаемые этой плоскостью на осях координат.
6. Уравнение плоскости, проходящей через данную точку.
а) Уравнение плоскости, проходящей через данную точку, в координатной форме имеет вид:

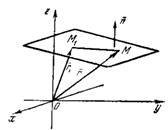
б) Уравнение плоскости, проходящей через данную точку, в векторной форме имеет вид:

 — данная точка, заданная радиусом-вектором
— данная точка, заданная радиусом-вектором  ,
, — радиус-вектор любой точки плоскости; — нормальный вектор (рис.1)
— радиус-вектор любой точки плоскости; — нормальный вектор (рис.1)7. Угол между двумя плоскостями.
а) Угол между двумя плоскостями, заданными уравнениями в координатной форме

определяется по формуле:

б) Угол между двумя плоскостями, заданными уравнениями в векторной форме

где
 определяется по формуле
определяется по формуле
8. Условие параллельности двух плоскостей имеет вид:

9. Условие перпендикулярности двух плоскостей имеет вид:

10. Расстояние от точки до плоскости.
Отклонением данной точки от данной плоскости называется число
 , равное длине перпендикуляра, опущенного из этой точки на плоскость, взятое со знаком плюс, если точка и начало координат лежат по разные стороны от этой плоскости, и со знаком минус, если они лежат по одну сторону от плоскости.
, равное длине перпендикуляра, опущенного из этой точки на плоскость, взятое со знаком плюс, если точка и начало координат лежат по разные стороны от этой плоскости, и со знаком минус, если они лежат по одну сторону от плоскости.Отклонение
получается в результате подстановки координат данной точки в нормальное уравнение данной плоскости
или в векторной форме

Расстояние d от точки
 до плоскости Ax + By + Cz + D = 0 равно абсолютной величине отклонения:
до плоскости Ax + By + Cz + D = 0 равно абсолютной величине отклонения:
или

в векторной форме:

11. Уравнение плоскости, проходящей через три данные точки

не лежащие на одной прямой, имеет вид:
а) в координатной форме:

б) в векторной форме:


. Практикум по математическому анализу. Урок 103")
. Практикум по математическому анализу. Урок 102")


. Практикум по математическому анализу. Урок 99")