
1. Проекции вектора. Проекцией вектора  на ось
на ось  называется число, равное длине отрезка
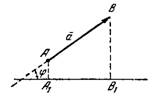
называется число, равное длине отрезка  взятое со знаком плюс, если направление отрезка совпадает с направлением оси , и со знаком минус, если эти направления противоположны (рис.1).
взятое со знаком плюс, если направление отрезка совпадает с направлением оси , и со знаком минус, если эти направления противоположны (рис.1).
Проекция вектора  на ось обозначается формулой
на ось обозначается формулой
 или
или 
Проекция вектора на ось выражается формулой

 ,
,где АВ = а — модуль вектора
, φ — угол наклона вектора к оси .Проекция суммы векторов на ось
равна сумме их проекций на ту же ось:
При умножении вектора на скаляр его проекция умножается на этот скаляр:

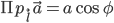
Рассмотрим прямоугольную систему координат и произвольный вектор
 (рис.2).
(рис.2).Очевидно, будем иметь:

или иначе.

где

Равенство (1) показывает, что всякий вектор можно разложить на три слагаемых вектора, лежащик на осях координат. Слагаемые векторы
 ,
,  и
и  называются составляющими вектора \vec{M} относительно системы осей координат Oxyz или его компонентами.
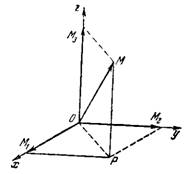
называются составляющими вектора \vec{M} относительно системы осей координат Oxyz или его компонентами.От точки О в положительном направлении каждой оси координат откладываем вектор, длина которого равна 1. Эти векторы называются единичными векторами или ортами и обозначаются соответственно через
 ,
,  и
и  (рис.3).
(рис.3).
Возвращаясь к равенству (1), заметим, что вектор как и вектор , расположены на оси_абсцисс, а потому имеем  , где х есть длина вектора , взятая со знаком плюс, если направления векторов и совпадают, и со знаком минус, если направления их противоположны. Другими словами, х есть число, являющееся проекцией вектора
, где х есть длина вектора , взятая со знаком плюс, если направления векторов и совпадают, и со знаком минус, если направления их противоположны. Другими словами, х есть число, являющееся проекцией вектора  на ось абсцисс.
на ось абсцисс.
Аналогично получим: и
и  , где у и z — проекции вектора соответственно на оси ординат и аппликат.
, где у и z — проекции вектора соответственно на оси ординат и аппликат.
Тогда равенство (1) перепишется так:

Равенство (2) дает разложение вектора по основным единичным векторам или по ортам
, и .Вместо полной записи
 часто пользуются сокращенной
часто пользуются сокращенной  или
или  .
.Здесь х, у, z обозначают проекции вектора
, или координаты точки М, являющейся концом радиуса-вектора .Длина вектора
определяется по формуле:
Если даны две точки
 и
и  , являющиеся соответственно началом и концом вектора
, являющиеся соответственно началом и концом вектора  , то его проекции на оси координат соответственно равны:
, то его проекции на оси координат соответственно равны:
а сам вектор в этом случае может быть записан в виде:

Его длина определяется по формуле:

Обозначив через α, β и γ углы вектора
 с осями координат, получим:
с осями координат, получим:
 называются направляющими косинусами вектора .
называются направляющими косинусами вектора .Из формул (4) и (5) следует:



2. Действия над векторами, заданными своими проекциями.
а) При сложении векторов одноименные их проекции складываются. Если даны векторы

то

б) При вычитании векторов одноименные их проекции вычитаются:

в) При умножении вектора на скаляр проекции вектора умножаются на этот скаляр:

Равенство (2) устанавливает связь между геометрической и алгебраической частями теории векторов.

. Практикум по математическому анализу. Урок 103")
. Практикум по математическому анализу. Урок 102")


. Практикум по математическому анализу. Урок 99")